计算机组成期末复习
Last updated on April 28, 2026 pm
这是SJTU-ICE2603《计算机组成》课程的期末复习。
简答题关键词:性能、功耗、成本、容量、速度、可靠性、并行
第一章 计算机的抽象与技术
1. 当前计算机发展的现状、所处的阶段及与过去的区别
- 后 PC 时代的特征:
- 个人移动设备替代个人电脑
- 电池供电
- 无线连接互联网
- 价格低
- 云计算接替传统服务器
- 仓储级计算机
- 软件即服务(在本地和云上各运行一部分软件)
- 个人移动设备替代个人电脑
2. 程序性能及评价的方法
- 程序性能的影响因素:
- 算法:决定了语句和执行 I/O 操作的数量
- 编程语言、编译器和体系结构:决定了每条语句对应的机器指令数量
- 处理器和存储系统:决定了指令的执行速度
- I/O 系统:决定了 I/O 操作的执行速度
- 性能的衡量指标:执行时间(或吞吐量)
- 时间是唯一对计算机性能进行测量的完整而可靠的指标
- 算法、编程语言、编译器:影响指令数和 CPI
- 指令集体系结构:影响指令数、CPI 和时钟频率
- 时间是唯一对计算机性能进行测量的完整而可靠的指标
- 基准测评程序(benchmark):
- 不同指令架构需使用对应编译的测试集
- 通常用高级语言编写,依赖编译器优化生成高效代码
- 广泛应用于计算机性能评估
- 性能的提升方法:
- 并行:
- 数据级并行:子字并行
- 指令级并行:多指令发射和乱序执行(循环展开)
- 线程级并行:多核硬件(循环并行)
- 存储层次:高速缓存分块技术
- 流水线、预测
- 并行:
3. 8 个伟大的思想所指代的意义
- 面向摩尔定律设计
- 使用抽象简化设计
- 加速经常性事件
- 通过并行提高性能
- 通过流水线提高性能
- 通过预测提高性能
- 存储层次
- 通过冗余提高可靠性
4. 计算机的组成部分
- 软件:
- 系统软件:操作系统、编译器、加载程序、汇编器等
- 应用软件:数据库系统等
- 硬件:输入部件、输出部件、存储器、数据通路(运算器)、控制器
- 数据通路和控制器构成了处理器
▶
补充:普林斯顿架构 和 哈佛架构 的对比
普林斯顿架构(冯·诺伊曼架构)
- 特点
- 统一存储体:指令和数据存放在同一存储器中,均以二进制形式存储
- 统一编址:内存和 I/O 端口共享唯一的地址空间
- 共享总线:指令和数据通过同一总线传输,按地址逐行存取
- 优点
- 设计简单:硬件结构单一,复杂度低
- 灵活性强:存储器空间动态分配;程序可动态修改自身代码
- 成本低:节省硬件资源
- 缺点
- 性能瓶颈:指令取指与数据存取无法并行,效率受限
- 安全性风险:指令与数据混存可能导致程序被意外修改
哈佛架构
- 特点
- 分离存储体:指令存储器和数据存储器物理隔离,独立编址
- 独立总线:指令和数据通过不同总线传输,支持并行访问
- 优点
- 高并行性:指令与数据并行存取,消除总线竞争,提升执行速度
- 安全性高:代码与数据隔离,防止程序被篡改
- 实时性强:适用于嵌入式系统和高吞吐量场景
- 缺点
- 硬件复杂:需独立的总线和存储控制器
- 灵活性差:指令与数据存储器容量固定;程序无法动态修改自身代码
- 成本高:需要更多硬件资源
小结
| 对比维度 | 普林斯顿架构 | 哈佛架构 |
|---|---|---|
| 存储体设计 | 指令与数据共享存储体 | 指令与数据分离存储体 |
| 总线类型 | 单一总线,分时复用 | 独立指令总线和数据总线 |
| 性能瓶颈 | 存在冯·诺依曼瓶颈 | 并行访问,无总线竞争 |
| 典型应用 | 通用计算机(如PC、服务器) | 嵌入式系统、DSP、物联网设备 |
| 成本与复杂度 | 低 | 高 |
5. 指令集体系结构(ISA)
- 指令集体系结构(ISA):硬件和底层软件之间的接口
- 包含了编写二进制机器语言程序所需的全部信息,如指令、I/O 设备等
6. CPI、降低功耗的方法
- CPI:算法、编程语言、编译器、ISA、硬件都会影响 CPI
- 降低功耗的方法:
- 硬件:降低时钟频率、降低电压、采用低功耗器件(如漏电流更小的晶体管)
- 软件:优化算法、编译器优化等
7. 单处理器和多处理器
- 多核处理器:一个芯片上有多个处理器
- 需要显式地并行编程,挑战在于提高性能、负载均衡、通信和同步
第二章 计算机的语言
1. 指令集,CISC 和 RISC,RISC-V
- 指令集:一台计算机的全部指令
- CISC 和 RISC:
| 对比项目 | CISC | RISC |
|---|---|---|
| 指令系统 | 复杂,庞大 | 简单,精简 |
| 指令数目 | 一般大于 200 条 | 一般小于 100 条 |
| 指令字长 | 不固定 | 定长 |
| 可访存指令 | 不加限制 | 只有 LOAD / STORE 指令 |
| 各种指令执行时间 | 相差较大 | 绝大多数在一个周期内完成 |
| 各种指令使用频度 | 相差很大 | 都比较常用 |
| 通用寄存器数量 | 较少 | 多 |
| 目标代码 | 难以用优化编译生成高效的目标代码程序 | 采用优化的编译程序,生成代码较为高效 |
| 控制方式 | 绝大多数为微程序控制 | 绝大多数为组合逻辑控制 |
| 指令流水线 | 可以通过一定方式实现 | 必须实现 |
- RISC-V 的特点:定长指令、精简指令集、32 个 通用寄存器
2. 指令,操作数、寄存器、立即数、有符号、无符号、符号扩展,不同进制的数值转换
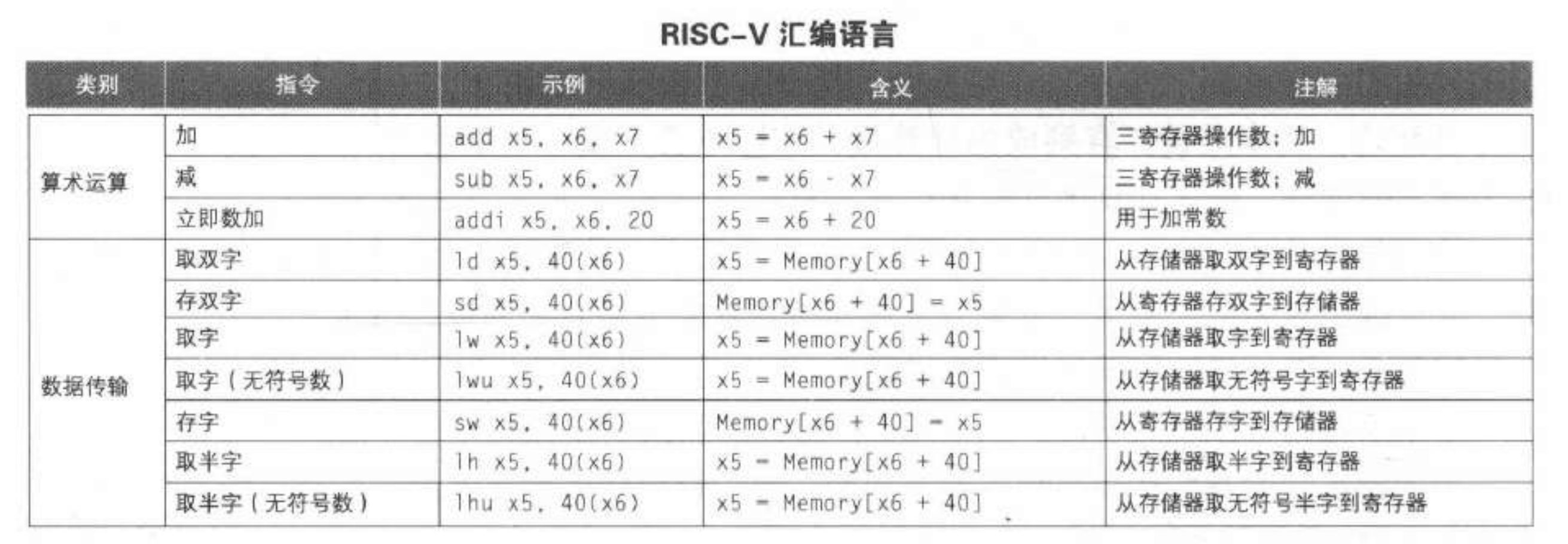
- 指令:RISC-V 的常见指令
-
操作数:
- 寄存器操作数:32 个 64 位寄存器(字表示 32 位)
- 存储器操作数:内存按字节编址,小端模式存储,无对齐限制
- 小端模式:低位字节位于字中的低地址
- 立即数操作数
-
数字的表示:
- 有符号整数:,表示范围:
- 有符号数取负:按位取反再加 1
- 符号扩展:把符号位复制到左边
3. 指令集设计的原则:RISC-V 的各种指令类型、寻址模式和基本的算术运算
- 指令集设计原则:
- 简单源于规整:易于实现,成本更低,性能更高
- 更少则更快:过多的存储器会增加时钟周期
- 优秀的设计需要适当的折中
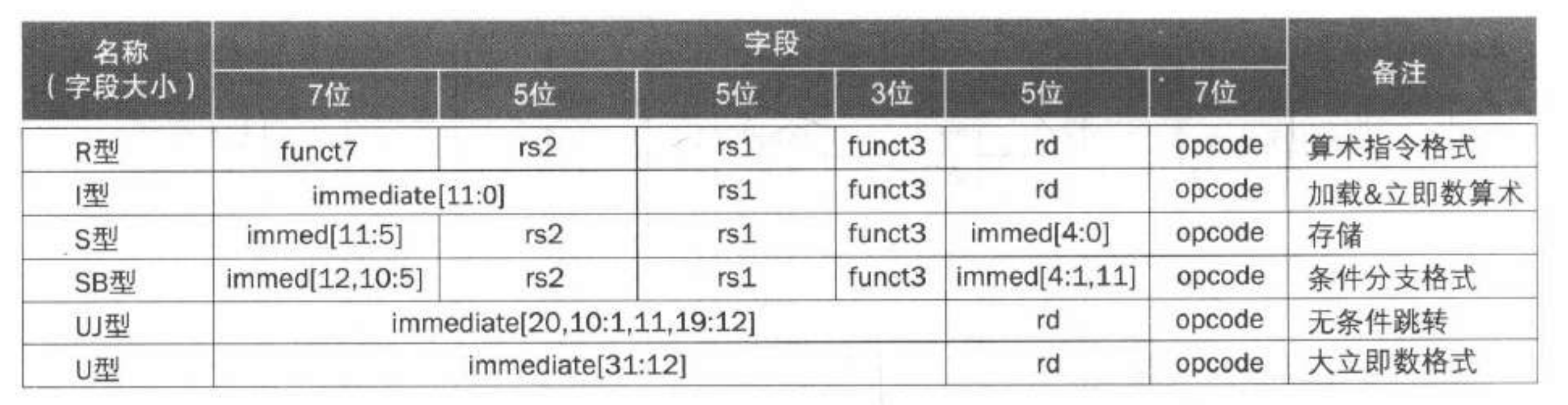
- RISC-V 的指令类型:
- 寻址模式:立即数寻址、寄存器寻址、基址寻址、PC 相对寻址
- PC 相对寻址:目标地址 = PC + 立即数 × 2
4. 指令简单分类,了解简单程序编程,子程序调用方法和堆栈操作
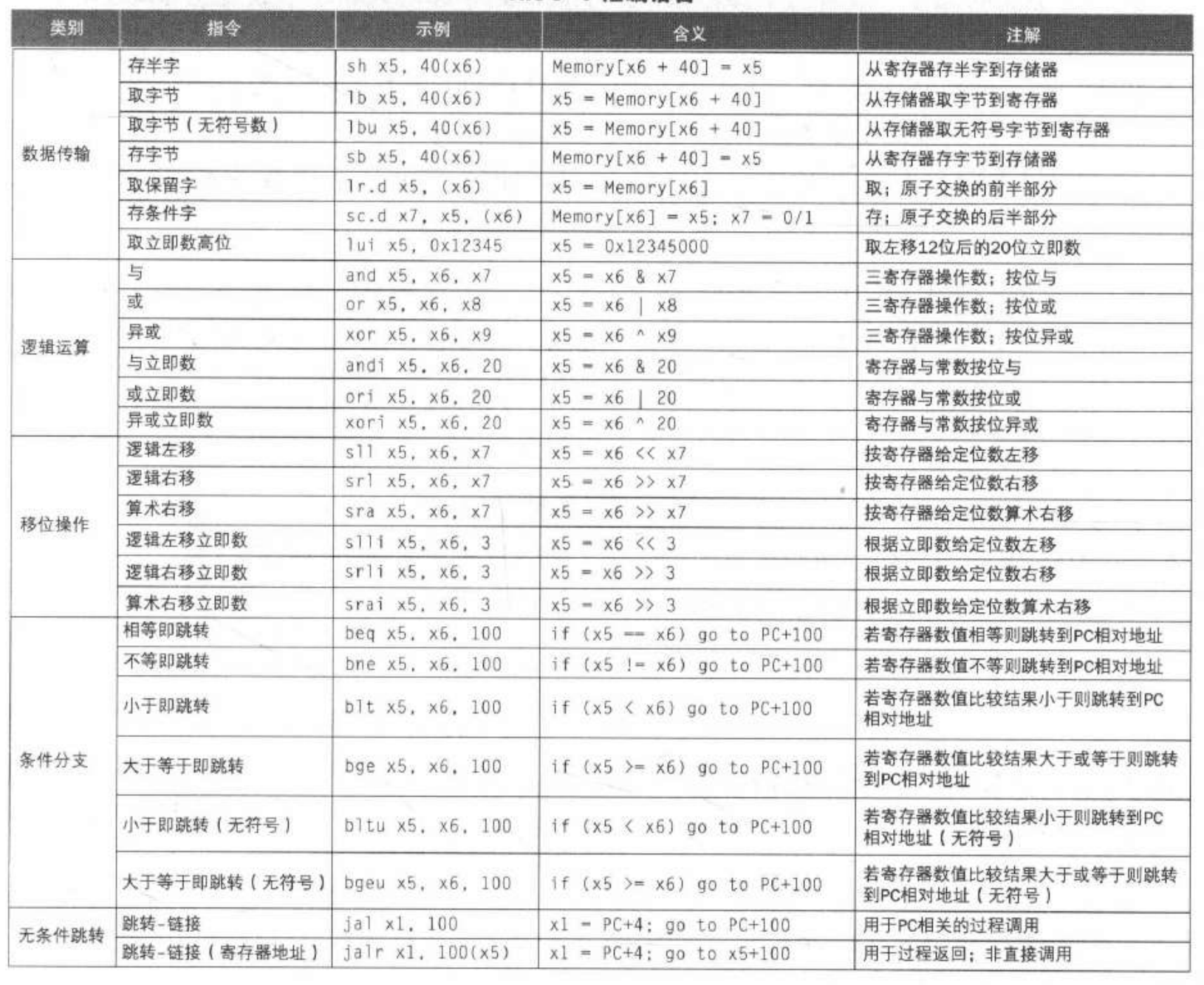
- 指令的简单分类:数据传输指令、算术运算指令、逻辑运算指令、移位运算指令、条件分支指令、无条件跳转指令
- 简单程序编程:分支结构、循环结构
- 子程序调用方法:将参数放在过程可以访问到的位置 获取过程所需的存储空间 执行过程中的操作 将结果值放在调用程序可以访问到的位置 将控制返回到初始点
- 过程调用:将下一条指令的地址(PC + 4)保存在 中,跳转到目标地址
1
jal x1, ProcedureLabel - 过程返回:跳转到 0 + 中保存的地址,把 用作目的寄存器
1
jalr x0, 0(x1) - 寄存器约定:
- :参数寄存器,用于传递参数或返回值
- :返回地址寄存器,用于返回到起始点
- ,: 临时寄存器,被调用者不需要保留其中的值
- ,: 保存寄存器,如用到这些寄存器,被调用者需先保存原值,用完再恢复原值
- 过程调用:将下一条指令的地址(PC + 4)保存在 中,跳转到目标地址
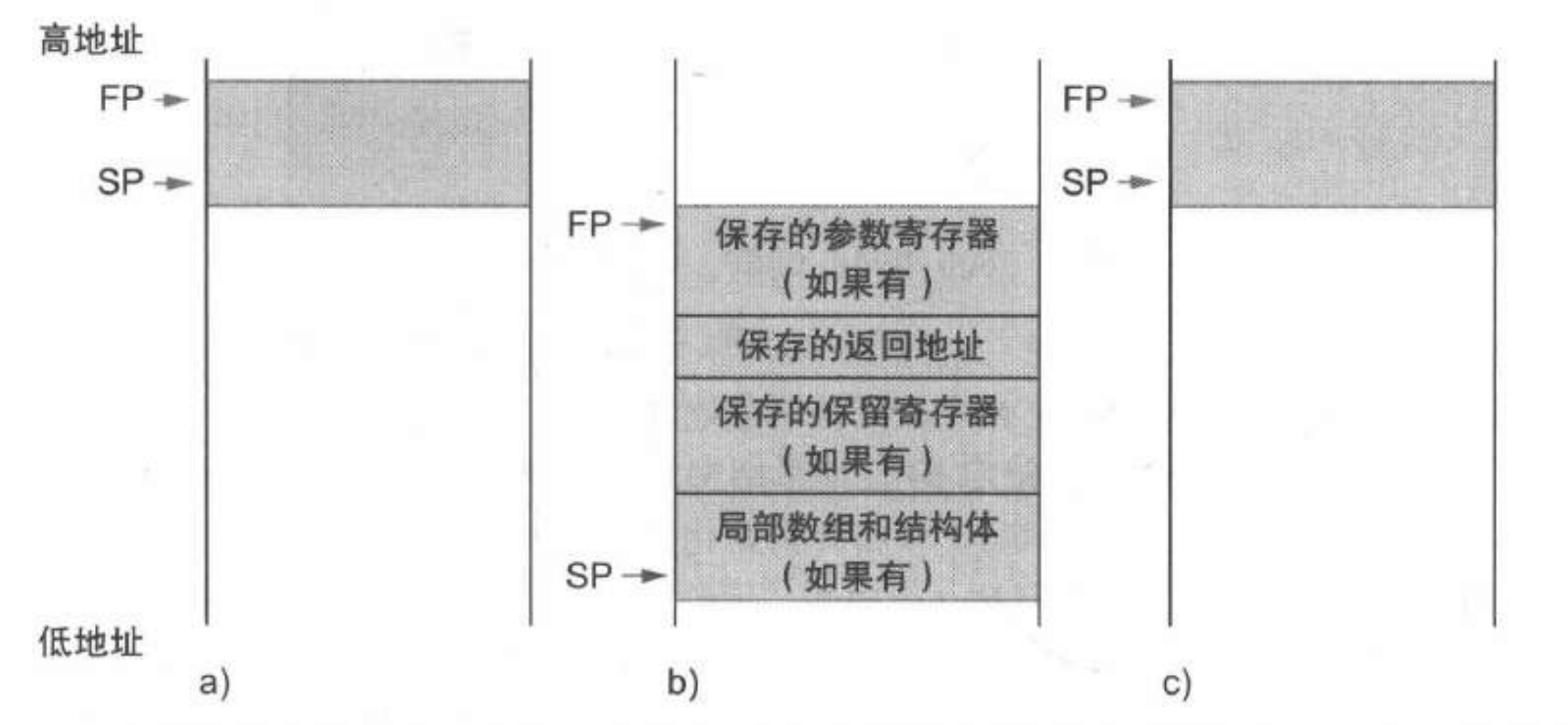
- 堆栈操作:
- 栈指针( 或 )指向栈顶
- 帧指针( 或 )指向帧的第一个双字
- 注意,栈向低地址方向扩展
5. 常量的使用、同步指令
- 32 位常量:加载 20 位常量到 rd[31:12],符号扩展 rd[63:32],将 rd[11:0] 清零
1 | |
- 同步指令:两个处理器共享存储器中的某一位置
- 预留取数:
1
lr.d rd,(rs1)- 从地址 rs1 处取数,保存到 rd
- 对内存地址设置预留
- 条件存数:
1
sc.d rd,rs2,(rs1)- 将 rs2 的内容保存到地址 rs1
- 如果从
lr.d之后该位置没有被更改则执行成功,在 rd 中返回 0 - 如果该位置被更改则执行失败,在 rd 中返回非 0 值
- 预留取数:
6. RISC-V 的指令集相对于 x86 的优点
- 更能充分利用芯片面积:CISC 采用微程序控制,其控制存储器占 CPU 芯片面积的 50% 以上;而 RISC 采用组合逻辑控制,其硬布线逻辑只占 CPU 芯片面积的 10% 左右。
- 运算速度快:RISC 的指令数、寻址方式和指令格式种类少,又设有多个通用寄存器,采用流水线技术,所以运算速度更快,大多数指令在一个时钟周期内完成。
- 便于设计、成本低、可靠性高:RISC 指令系统简单,因此机器设计周期短;其逻辑简单,出错概率低,有错也易发现,因此可靠性高。
- 有利于编译程序代码优化:RISC 指令类型少,寻址方式少,使编译程序容易选择更有效的指令和寻址方式,并适当地调整指令顺序,使得代码执行更高效化。
7. 编译器,汇编器有关的概念
- 编译器:将高级语言程序转换为汇编语言程序(或直接生成目标模块)
- 汇编器:将汇编语言程序转换为目标模块
- 目标模块(.o)的组成:
- 头:描述目标模块的内容
- 代码段:翻译后的指令
- 静态数据段:分配的数据,作用于程序生命周期
- 重定位信息:依赖于程序加载的绝对地址的内容(用于加载程序)
- 符号表:匹配标签名和指令所在地址及外部引用(用于链接模块)
- 调试信息:用于关联到源代码
第三章 计算机的算术运算
1. 数字的计算机表达方法
- 整数和浮点数的表示:见其他部分
2. 整数的运算:加法和减法、乘法和除法处理溢出
- 上溢:一个数字的绝对值过大,超出数据类型的表示范围
- 下溢:一个数字的绝对值过小,无法在给定的精度下表示
- 加法和减法的溢出判断:
| 操作 | 操作数 符号 | 操作数 符号 | 溢出条件(结果符号) |
|---|---|---|---|
- 乘法和除法的溢出处理:
- 乘法:用
mulh/mulhu的结果来检查 64 位的溢出 - 除法:不产生错误,只返回预先定义的结果
- 乘法:用
3. 浮点实数:表示及运算
- 浮点数的表示:
-
规格化的科学计数法:
-
IEEE 浮点格式:
类型 符号位 指数位 尾数位 偏阶 单精度(32位) 1 8 23 127 双精度(64位) 1 11 52 1023 - :符号位(0 非负数,1 负数)
- 规格化二进制数的前导位 1 是隐含的,即有效位数是 24 或 53 位
- 指数 = 实际指数 + 偏阶
-
- 浮点数的加法:
- 步骤:
- 对齐二进制小数点(右移指数小的数)
- 将有效数字相加
- 规格化结果并检查上溢 / 下溢
- 舍入,如有需要再次规格化
- 通常占几个周期,可流水线化
- 步骤:
4. 了解算术运行的硬件实现方法和特点
- 加法:通过超前进位加法器可分解为独立阶段,支持流水线化
- 减法:通过补码转为加法实现,同样支持流水线化
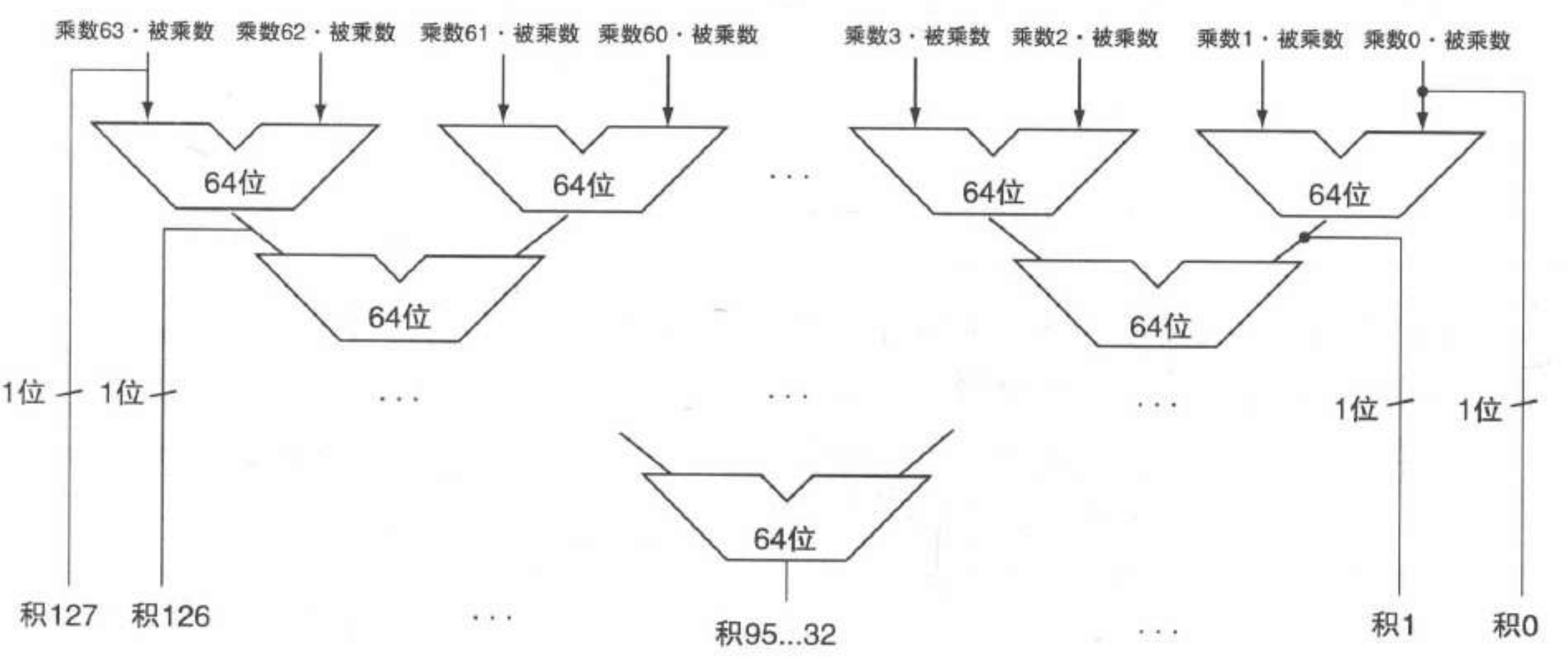
- 乘法:
-
串行乘法器:
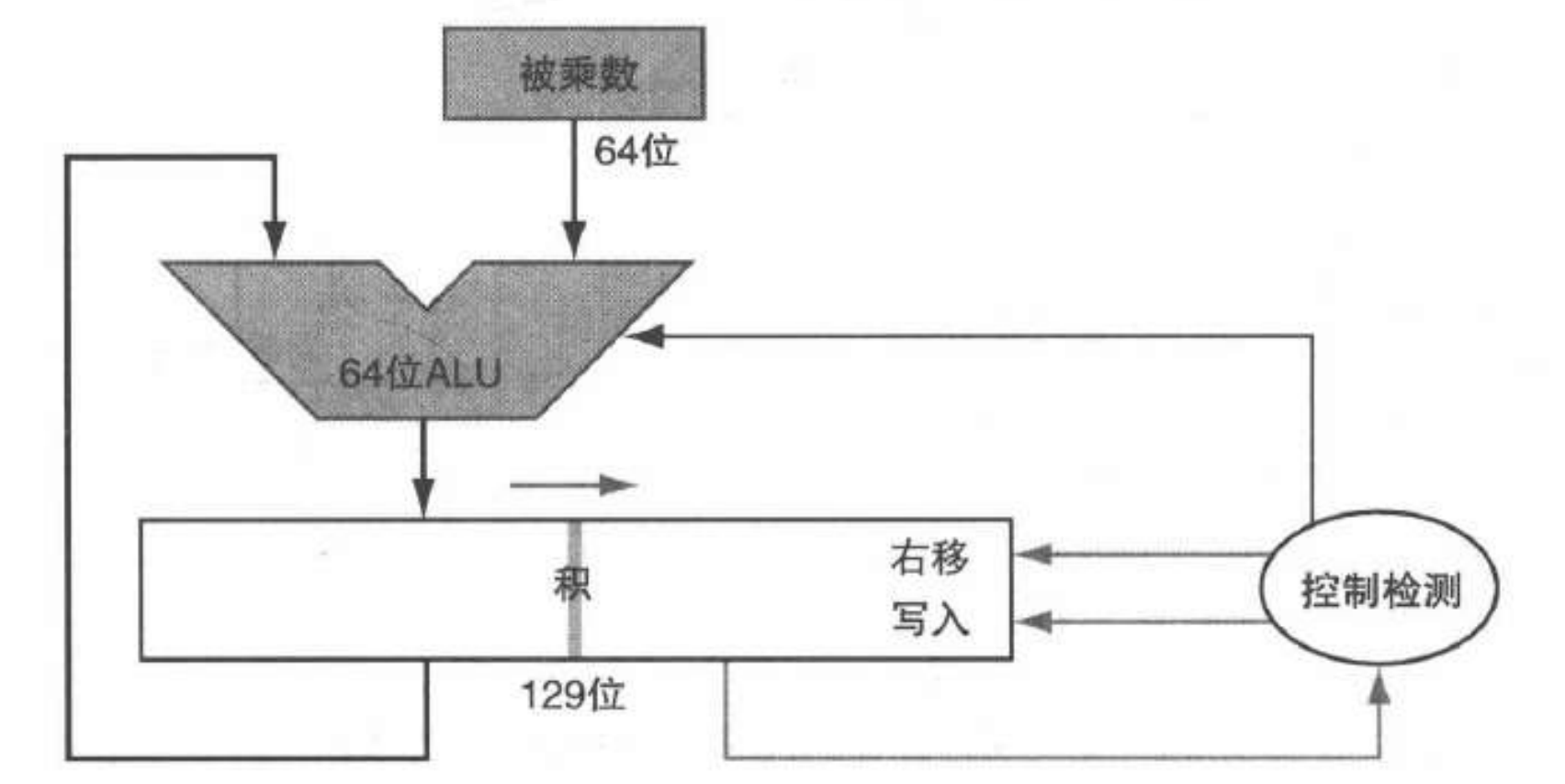
-
快速乘法器:每个乘数位提供一个 64 位加法器,可流水线化
-
- 除法:
-
除法器:
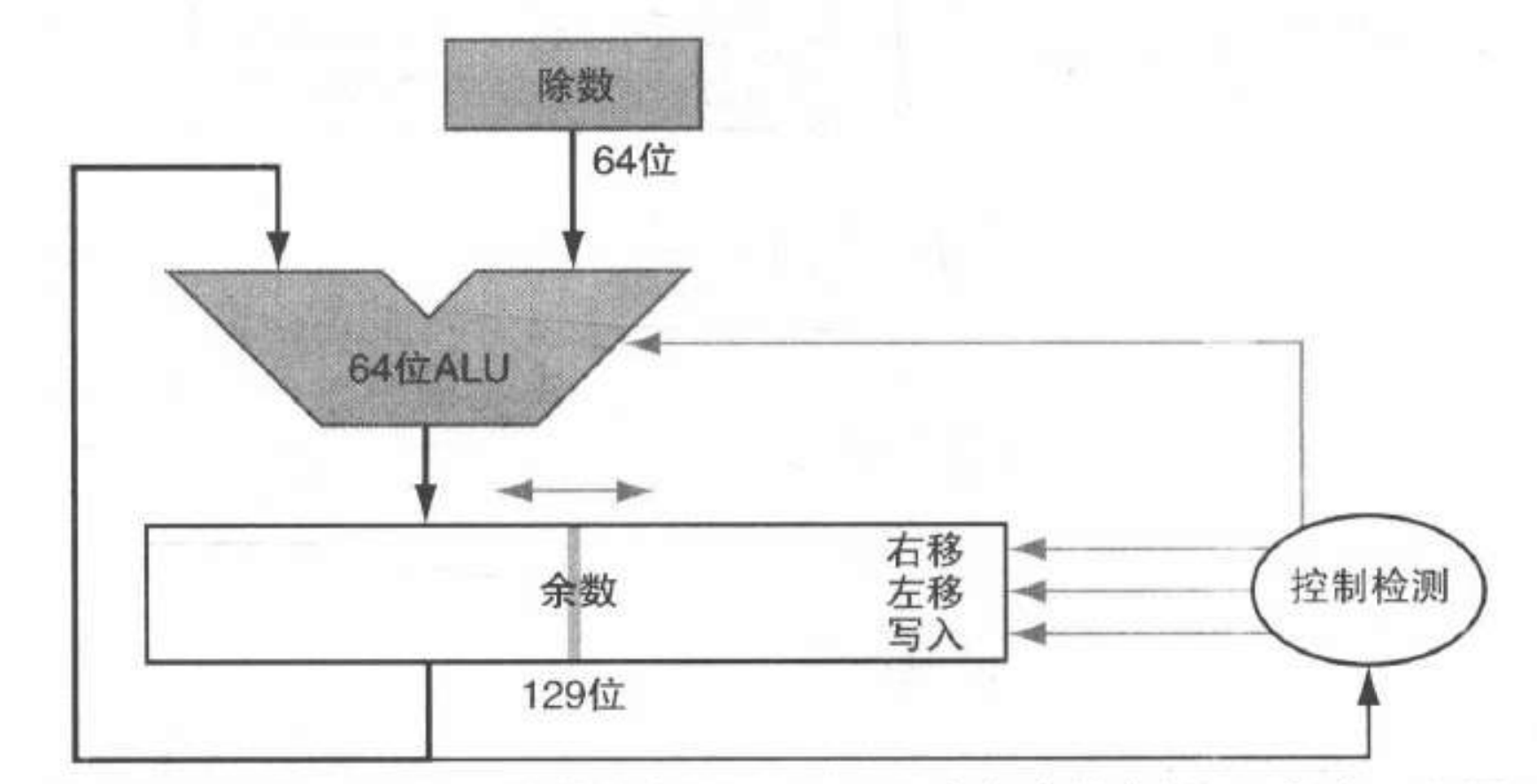
-
无法并行:减法取决于余数的符号,不能流水线化
-
SRT 除法:可以通过预测多位商再纠正错误的方法来加速
-
5. RISC-V 的算术运行指令
- RISC-V 乘法指令:
| 指令 | 功能描述 |
|---|---|
mul |
取乘积低 64 位 |
mulh |
有符号乘法取高 64 位 |
mulhu |
无符号乘法取高64位 |
mulhsu |
有符号 × 无符号取高 64 位 |
- RISC-V 除法指令:
| 指令 | 功能描述 | 指令 | 功能描述 |
|---|---|---|---|
div |
有符号除法 | divu |
无符号除法 |
rem |
有符号取余 | remu |
无符号取余 |
- RISC-V 浮点指令:

6. 子字并行,SIMD
- 子字并行:在一个宽字内部进行的并行操作
- 如:在 128 位加法器内并行操作 16 个 8 位操作数
- 用于图像和音频应用对短向量的同时运算
- 又称数据级并行、向量并行、SIMD (单指令多数据)
7. 结合律问题
- 浮点加法不满足结合律:
- 原因:浮点算术精度有限
- 结果;并行计算机可能按不同顺序计算,导致不同结果
8. 运算精度和表达范围
- 浮点表示范围:
- 指数全 0 和全 1 为保留值
- 单精度:
- 双精度:
- 浮点精度:
- 单精度:约
- 双精度:约
第四章 处理器
1. RISC-V 的实现方法(单周期实现,流水线实现)
- 做过实验了这个应该都会吧~
2. 指令的执行过程,时序电路和组合电路
- 指令的执行过程:
- 根据当前 PC 值取指
- 读取寄存器
- 用 ALU 计算
- 算术运算结果
- 用于取数 / 存数的存储器地址
- 分支比较
- 访问数据存储器以取数 / 存数
- PC + 4 或 指向目标地址
3. 数据通路,ALU,控制单元
- 数据通路:
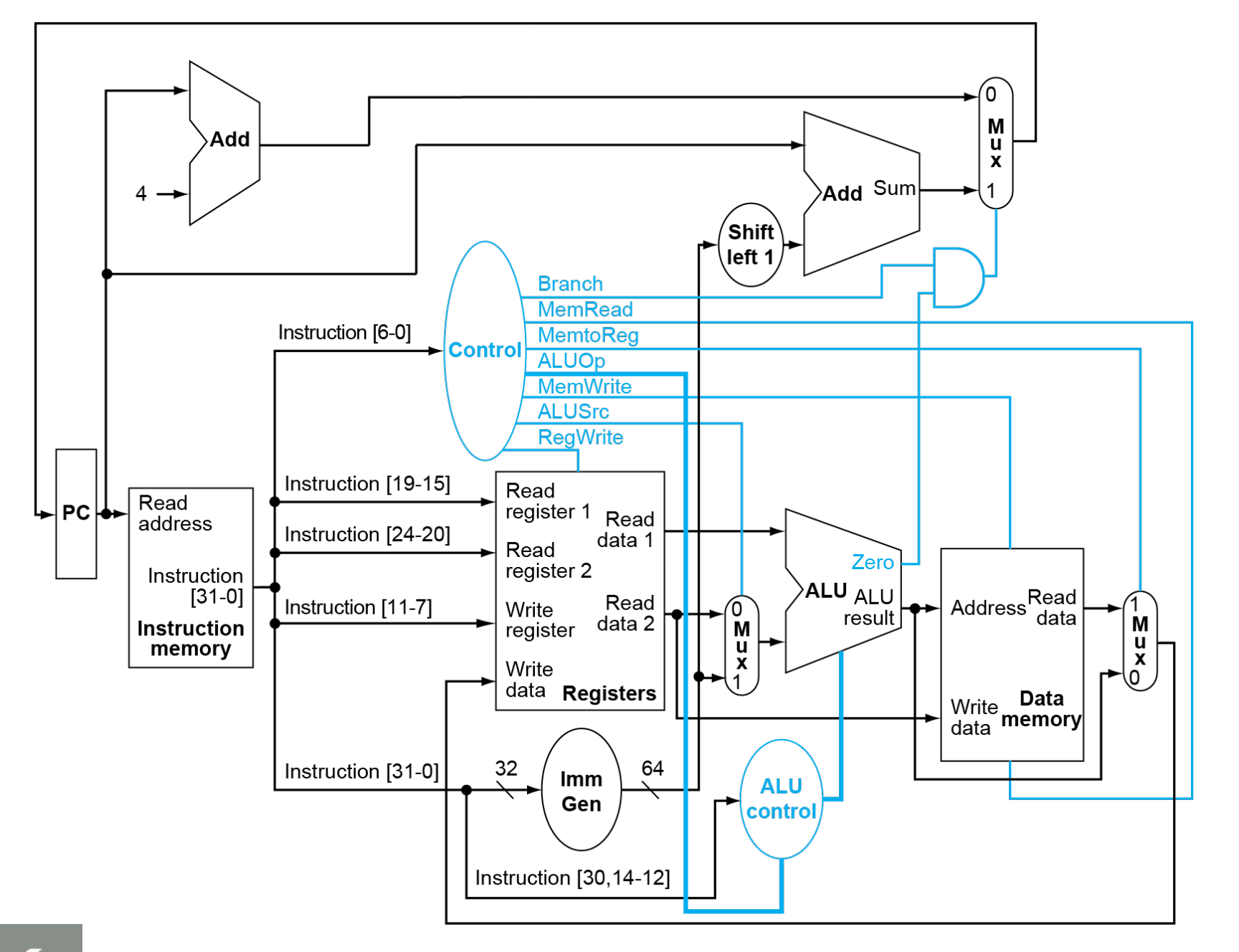
- ALU:算术逻辑单元,是组合逻辑电路
- 控制单元:从指令得到控制信号,是组合逻辑电路
4. 单周期实现的性能问题
- 时钟周期过长:为满足最长指令路径,导致周期过长
- 违反设计原则:加速大概率事件
- 扩展性差:无法支持浮点运算等复杂指令
- 吞吐量低:CPI = 1 但周期过长,实际吞吐量低
5. 流水线的加速比,设计方法和指导原则
- 流水线加速比:等于流水线级数(各级耗时相同且大量指令)
- 若不平衡,时钟周期取决于最慢的操作
- 通过提高吞吐量来提高性能
- 面向流水线设计:指令长度相同、格式规整、存储器操作数只在 load / store 指令中
- 指导原则:加速大概率事件、指令级并行
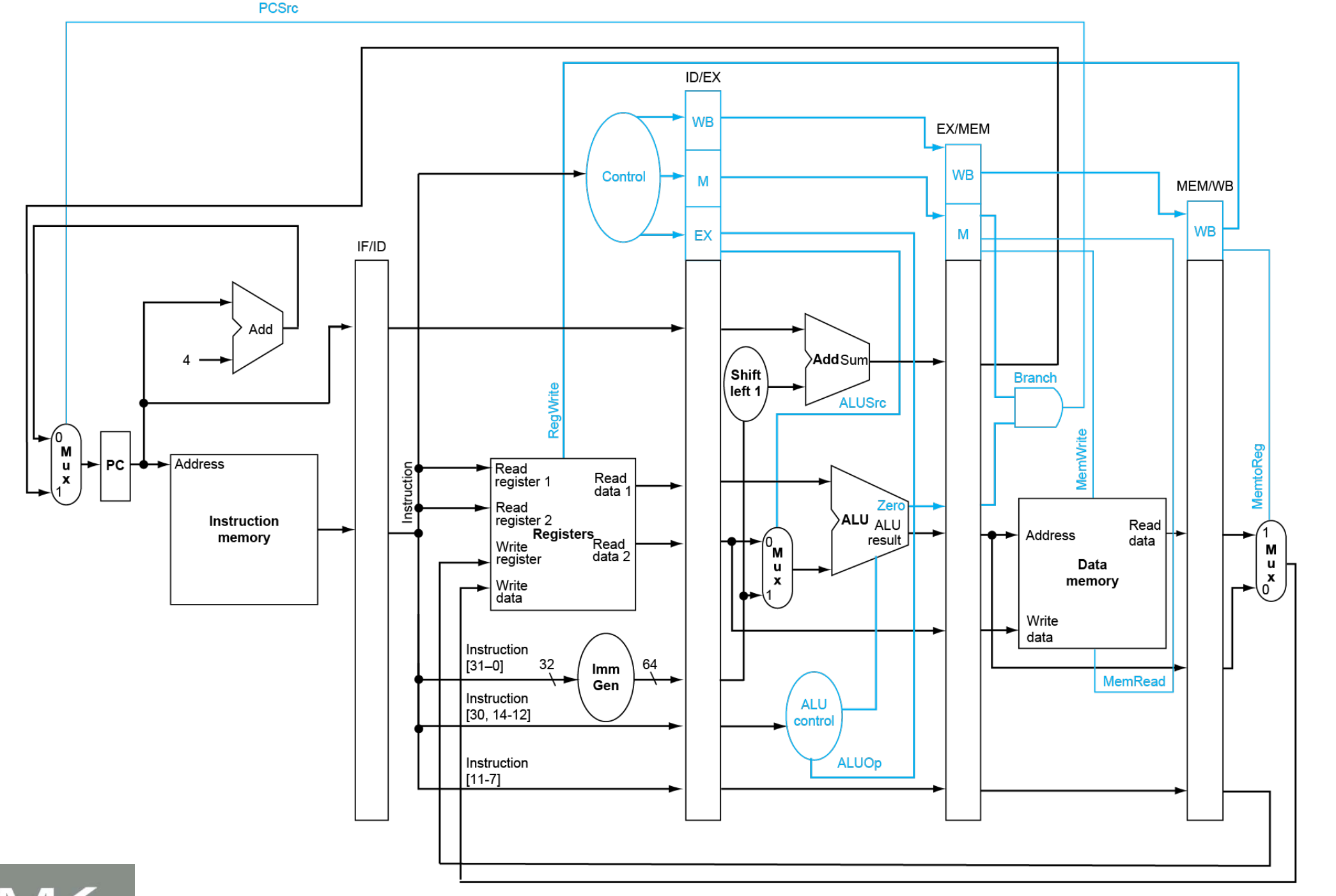
6. 五级流水线的实现方法,指令运行多周期流水图
- 五级流水线:
- IF:从指令存储器中读取指令
- ID:指令译码以及读寄存器
- EX:执行操作或计算地址
- MEM:访问存储器操作数(如有)
- WB:将结果写回寄存器(如有)
- 实现:
- 增加各级间寄存器(用于保持前一周期产生的信息)
- 保留目标寄存器号
7. 流水线的控制,指令冒险和解决方法
- 结构冒险:
- 原因:所需资源正被占用
- 举例:第一条指令从存储器取数据的同时,第四条指令从同一存储器取指令
- 策略:分离指令和数据存储器或 cache(采用哈佛架构)
- 数据冒险:
- 原因:需要等待先前的指令完成数据读写
- 举例:一条加法指令后面紧跟着一条使用其结果的减法指令
- 策略:
- 旁路(前推):当算出结果就直接使用,不等到结果被存入寄存器
- 取数-使用型数据冒险:无法靠旁路来避免阻塞,需要阻塞 1 个周期(或重排代码解决)
- 阻塞方法:
- 强制将 ID/EX 寄存器中的控制信号置 0
- 阻止 PC 和 IF/ID 寄存器更新
- 控制冒险:
- 原因:对控制行为的决策依赖于先前的指令
- 举例:需要根据分支结果取得下一条指令
- 策略:
- 分支预测
- 简单方法:预测分支不发生
- 静态预测:基于典型的分支行为
- 动态预测:保存每个分支的历史记录并据此预测未来
- 分支预测缓存:按分支指令地址索引,保存分支结果
- 2位预测:仅在连续两次预测错误时改变
- 分支目标缓存:使用一个缓存来保存目标地址
- 缩短分支延迟:将用于确定分支结果的硬件移到 ID 级,此时预测错误只需要阻塞 1 个周期
- 阻塞方法:使用 IF.Flush 清空 IF/ID 寄存器中的指令字段
- 分支预测
8. 提升流水线性能的方法
- 增加流水线级数:时钟周期更短,吞吐量更高
- 平衡各段延迟:拆分长周期阶段,最慢阶段决定整体频率
- 编译器辅助优化:重排代码,减少流水线停顿;循环展开,提高并行度
- 多发射技术:指令级并行,超标量、超长指令字
9. 异常处理和中断机制对流水线运行的影响
- 异常处理:
- 保存发生异常的指令地址:SEPC(系统异常程序计数器)
- 记录异常发生的原因:SCAUSE(系统例外原因寄存器)
- 跳转到处理程序:
- 操作系统读取异常原因,并跳转相应处理程序
- 决定采取的动作,如重启程序或终止程序
- 向量式中断(另一种方式):
- 处理程序的地址由中断原因决定(基址寄存器加上异常原因偏移)
- 对流水线运行的影响:
- 清除流水线中之后的指令
- 将例外入口地址送给 PC 寄存器
- 将引发异常的指令地址保存在 SEPC 寄存器中
10. 指令级并行,多发射,多发射多周期流水图
- 多发射:一个时钟周期内发射多条指令
- 静态多发射:由编译器来支持指令打包和处理冒险
- 超长指令字:将指令分组为发射包
- 动态多发射:即超标量,由硬件来判断当前周期发射的指令数
- 执行过程:取指和译码单元(按序发射)、功能单元(乱序执行)、提交单元(按序提交)
11. 循环展开,推测执行、态调度等技术与编译器和运行功耗等的关联
- 循环展开:一种编译技术,复制循环体以展现更高的并行度
- 寄存器重命名:避免循环带来的反相关
- 推测执行:允许编译器或处理器猜测指令的行为,并允许其他与被推测指令相关的指令提前开始执行
- 要检查预测结果是否正确;若预测错误,要进行恢复
- 编译器推测:根据推测结果重排指令,可以包含从错误中恢复的指令
- 硬件推测:缓存结果,直至确定结果正确;若推测错误,则清除缓存
- 静态调度:编译器必须消除部分或全部冒险
- 动态调度:用硬件对指令执行顺序进行重排,避免了对编译器调度的需求
- 不是所有的流水线停顿都能静态预测、无法总是对分支做静态调度
- 与运行功耗的关联:循环展开、推测错误、动态调度都会增大功耗
第五章 存储器层次结构
1. 局部性原理,存储器层级结构
- 时间局部性:如果某个数据项被访问,那么在不久的将来它可能再次被访问
- 空间局部性:如果某个数据项被访问,与它地址相邻的数据项可能很快也将被访问
- 存储器层次结构:磁盘 主存储器 (DRAM) cache (SRAM)
- 特点:离处理器越近,访问速度越快,价格越昂贵,容量越小
- 目的:以最低的价格为用户提供最大容量的存储,同时访问速度与最快的存储相当
2. 存储分类及使用上的特点
- SRAM:易失性,用于高速缓存,不需要刷新
- DRAM:易失性,用于主存,需要周期性刷新
- 具有行缓冲器,支持突发传输
- 闪存:非易失性,写操作会对器件本身产生磨损(耗损均衡)
- 磁盘:非易失性,柱面、盘面、扇区
3. 高速缓存存储器(直接映射、组相联、全相连;标记、有效位,块,命中,缺失;写直达,写回,写分配,写不分配)
- 地址映射方式:
- 直接映射:每个存储地址都被直接映射到 cache 中的确定位置
- cache 块号:由
块地址 % cache块数决定
- cache 块号:由
- 全相连映射:数据块可以存放在 cache 的任意位置
- 比对方式:每次搜索所有的项
- 组相连映射:每个数据块在 cache 中有 n 个位置可放
- cache 组号:
块地址 % cache组数 - 比对方式:每次搜索给定组的所有项
- cache 组号:
- 直接映射:每个存储地址都被直接映射到 cache 中的确定位置
- cache 数据块:
- 索引:用来选择数据块(块地址低位)
- 标记:记录块地址信息(块地址高位),用于确定所需数据块是否在 cache 中
- 有效位:表示该表项中是否保存了有效数据
- 写策略:
- 写直达:同时更新 cache 和主存,需写缓冲降低延迟
- 写缺失处理:写分配(取入 cache 并更新)、写不分配(只更新主存)
- 写回:仅更新 cache,替换时写回主存,需脏位标记修改过的块
- 写缺失处理:通常写分配(取入 cache 并更新)
- 写直达:同时更新 cache 和主存,需写缓冲降低延迟
4. Cache 性能的度量(平均访问时间,缺失代价;对程序性能评估时的影响)
- 平均访问时间:
- 缺失代价:
- 强制缺失:首次访问一个块时
- 容量缺失:由于 cache 的大小有限,被替换掉的块随后又被访问到
- 冲突缺失:在非全相连 cache 中,很多块为了竞争同一个组导致的缺失
- 对性能评估的影响:降低缺失代价或缺失率,可以提高性能
5. Cache 的替换规则,多级 Cache 的设计目标
- 替换规则:
- 随机替换
- 最近最少使用(LRU):优先替换最久未访问的块
- 多级 cache 的设计目标:降低缺失代价
- 一级 cache:侧重于最小命中时间,以提高工作频率
- 二级 cache:侧重于低缺失率,避免访问主存储器
6. 与高级 CPU、算法等的交互作用影响(如何充分发挥 Cache 的作用)
- 与高级 CPU 的交互作用:
- 乱序执行 CPU 能在 cache 缺失期间执行指令
- 缺失造成的影响取决于程序的数据流动,需要进行系统仿真
- 与算法的交互作用:
- 缺失取决于存储器的访问模式,包括算法行为和编译器优化
- 如何充分发挥 cache 的作用:使用乱序执行 CPU、算法优化、编译器优化、循环展开
7. 可信度、可靠性
- 可靠性:系统能够持续提供用户需求的服务的度量
- 度量方法:平均无故障时间(MTTF,mean time to failure)
- 平均修复时间(MTTR,mean time to repair)
- 平均失效间隔时间(MTBF,mean time between failures)
- 可用性:系统正常工作时间在连续两次服务中断间隔时间中所占的比例
8. 虚拟机技术,存储器保护技术
- 虚拟机作用:更好地隔离多客户、避免安全性和可靠性问题、有助于资源共享
- 虚拟机监视器:支持虚拟机的软件
- 将虚拟资源映射到物理资源、隔离客户端状态
- 控制特权态的访问、I/O、异常和中断等
- 指令集支持:分为用户模式和系统模式
- 特权指令仅在系统模式下可用(用户状态下会内陷)
- 所有物理资源只允许用特权指令访问
- 存储器保护技术:
- 不同任务可以共享其部分虚拟地址空间,但要防止不当访问
- 页表和其他状态信息只在超级用户模式下可访问
9. 虚拟存储器(地址转换、页,页表、缺页、缺页代价、缺页处理;页表的控制、存储和组织;TLB,TLB 的缺失及处理方法,TLB 与 Cache 的关系)
- 虚拟存储器:将主存储器作为辅存的 cache 使用
- 地址转换:CPU 和 OS 将虚拟地址转换为物理地址
- 虚拟地址:高位为虚拟页号,低位为页内偏移
- 物理地址:高位为物理页号,低位为页内偏移
- 页表:位于内存中,保存着虚拟页号和物理页号之间的转换关系
- 缺页代价:缺页时必须从磁盘取这一页
- 缺页处理:CPU 中断后 OS 处理(对比 cache 缺失由硬件处理)
- 页表:页表项构成的数组,按虚页号索引
- 有效位为有效:页表项存储物理页号及其他状态位(引用位、脏位等)
- 有效位为无效:页表项指向它在磁盘交换区中的位置
- 替换策略:最近最少使用(LRU),降低缺页率
- 写策略:写回策略,原因是写磁盘时间开销大
- 快表(TLB):页表的 cache,记录最近使用的地址映射信息,避免每次访问页表
- TLB 缺失:
- 页在内存中:从内存读页表项,更新 TLB,然后重试
- 页不在内存中:OS 进行取页并更新页表,然后重启引起缺页的指令
- TLB 和 cache 的关系:
graph TD
A[虚拟地址] --> B{TLB命中?}
B -- 是 --> C[获取物理地址]
B -- 否 --> D[查页表]
D --> E{页在内存?}
E -- 是 --> F[更新TLB并获取物理地址]
E -- 否 --> G{主存有空闲页?}
G -- 否 --> H[磁盘页读入主存]
G -- 否 --> I[选一页替换]
I --> H[页读入主存]
H --> J[更新页表和TLB]
C --> K[cache命中?]
F --> K[cache命中?]
K -- 是 --> L[读cache数据]
K -- 否 --> M{cache有空闲块?}
M -- 是 --> N[主存块读入cache]
M -- 否 --> O[选一块替换]
O --> N[主存块读入cache]
N --> L[读cache数据]
10. Cache 一致性定义,Cache 一致性协议
- cache 一致性定义:
- 非正式定义:读操作返回最新写入的值
- 正式定义:
- P 写 X,P 读 X(其间没有写操作),那么读操作返回写操作的值
- P1 写 X, P2 读 X(充分长时间后),那么读操作返回写操作的值
- P1 写 X,P2 写 X,那么所有处理器看到的写操作顺序相同
- cache 一致性协议:
- 监听协议:每个 cache 监视总线的读/写
- 写无效协议:cache 要写一个块时,获得独占访问;写入时使得其他 cache 中的副本无效
- 基于目录的协议:cache 和存储器记录一个目录中块的共享状态
- 监听协议:每个 cache 监视总线的读/写
11. 存储器一致性问题
- 存储器一致性问题:写入值何时可以被其他读取操作看到
- 直到所有处理器都看见一个写操作时,写操作才完成
- 处理器不会重排写操作的顺序(但可以重排读操作的顺序)
12. DGEMM 算法的优化方案
- 目标:在数据被替换之前尽量多用到
- 优化方法:分块放入 cache 运算
第六章 从客户机到云的并行处理器
1. 多处理器:伸缩性、可用性、功耗效率
- 伸缩性:计算能力提升以处理更大规模任务
- 可用性:单个处理器故障时,其余处理器可继续提供服务
- 功耗效率:相同计算任务,多核协作比单核高频运行更省电
2. 任务级(进程级)并行、并行处理程序
- 任务级(进程级)并行:运行多个相互独立的任务,能提高吞吐量
- 并行处理程序:多个处理器上运行单个程序
3. 多核微处理器
- 多核微处理器:包含多个处理器(核)的微处理器
4. 并行处理的软硬件分类方法(串行、并行;顺序、并发)
- 硬件分类:
- 串行:每个时钟周期只执行一条指令
- 并行:通过多处理器或超标量等设计同时执行多条指令
- 软件分类:
- 顺序:程序指令按先后次序执行,如矩阵乘法 / 编译器
- 并发:程序包含多个可独立调度的执行单元,如操作系统
- 顺序/并发软件可运行于串行/并行硬件
5. 并行处理的指令与数据流分类方法
- SISD:单指令流单数据流,如单处理器
- SIMD:单指令流多数据流,数据级并行,如向量处理器
- MISD:多指令流单数据流,没有实例
- MIMD:多指令流多数据流,线程/进程级并行,如多核 CPU、集群
6. 并行编程,强比例缩放和弱比例缩放
- 并行编程的困难:调度和划分、均衡负载、通信开销
- 强比例缩放:保持问题规模不变时所测量的加速比,提升困难
- 弱比例缩放:问题规模与处理器的数量成比例增长时所测量的加速比
7. SPMD、SIMD、MIMD(向量处理器;多媒体扩展)
- SPMD:单程序多数据流,即单个程序运行在所有处理器上,属于 MIMD
- 向量处理器:高度流水的功能单元,每个向量寄存器包含多个数据元,属于 SIMD
- 优势:降低指令带宽、减少流水线停顿、简化数据并行编程、减少数据冒险的硬件检查、可通过交叉存储器降低访存开销、降低功耗和能耗、避免循环导致的控制冒险
- 多媒体扩展:与向量处理器类似,但不支持按步长存取、操作数量少
8. 多线程(粗颗粒度、细颗粒度、同时多线程)
- 细粒度多线程:在每个时钟周期之后切换线程
- 能隐藏停顿造成的吞吐量损失,但单个线程执行速度减慢
- 粗粒度多线程:仅在长时间阻塞时切换线程(如末级 cache 缺失)
- 不会减慢单个线程的执行速度,但无法隐藏短阻塞,降低吞吐量损失有限
- 同时多线程(SMT):多发射和动态调度多线程指令
- 充分利用并行功能单元、动态调度解决相关性问题
- 线程级并行、指令级并行
9. 共享内存多处理器(SMP):UMA、NUMA,锁变量
- 共享内存多处理器:为所有处理器提供统一物理地址空间
- 存储器访问时间:
- UMA(统一内存访问):访存延迟不依赖于是哪个处理器的请求
- NUMA(非统一内存访问):访存延迟取决于哪个处理器访问哪个存储
- 同步机制:用锁来同步共享变量,同一时刻仅允许一个处理器访问数据
10. CPU 和 GPU 的工作原理及异同
- 工作原理:高度并行化,是由多线程 SIMD 处理器组成的 MIMD
- GPU 与 CPU 的异同:
- 都含有计算单元、存储单元和控制单元,但 GPU 的计算单元更多,存储单元和控制单元简化
- CPU 面向低延迟设计,有强大的 ALU、大容量 cache、复杂的控制逻辑
- GPU 面向高吞吐设计,cache 容量小,控制逻辑简单,ALU 能耗低
希望大家考试取得好成绩!
计算机组成期末复习
https://cny123222.github.io/2025/06/06/计算机组成期末复习/